Mobile Roboter werten meist 3D-Laserscan- oder Kinect-Daten aus, um im Raum autonom navigieren zu können. Die mit dieser Technologie verbundenen Verfahren scheitern an mindestens einer der Herausforderungen: Navigation, Energieversorgung, Kosten. Daher arbeitete die Softwaremanufaktur seit Mai 2016 am Forschungsprojekt awNav im Rahmen der niedrigschwelligen Innovationsförderung für KMU und Handwerk. Erfolgreich konnte die Entwicklung einer Steuerungssoftware zur autonomen Navigation von Servicerobotern an, welche auf der Auswertung von 2D-RGB Kameradaten beruht abgeschlossen werden.
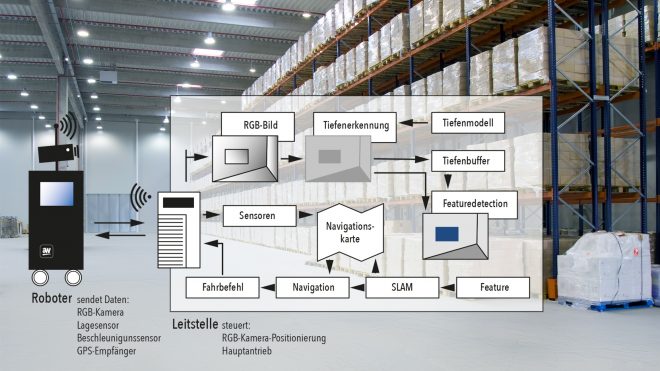
Im Detail konnten folgende Milestones erreicht werden: Da bei der Verwendung einer 2D-Kamera die zur Navigation essenziellen Tiefeninformationen fehlen, werden diese mit Hilfe eines algorithmischen Modells auf einer externen Leitstelle berechnet. Das System ist via W-LAN mit dieser Leitstelle verbunden und übermittelt kontinuierlich die notwendigen, durch die Kamera gesammelten Informationen. Auf der Leitstelle werden die 2D-Rohdaten hinsichtlich Tiefe und Features ausgewertet, die aktuelle Position bestimmt und die Ergebnisse in Form von Steuersignalen zurück an das Navigationssystem gesendet. Dies erfolgt innerhalb von maximal 50 ms und unter Einhaltung von relevanten Sicherheitsnormen. Der für die Navigation entstehende Energiebedarf des Roboters selbst ist durch diesen Systemaufbau sehr gering. Das Modell zur Berechnung der Tiefen- und Featureinformationen war Schwerpunkt der Entwicklung.
Das Gesamtkonzept beruht auf Machine Learning. Das impliziert, dass das entwickelte Verfahren zunächst trainiert werden musste, bevor die Technologie in einem konkreten Anwendungsszenario eingesetzt werden konnte. Im Rahmen der Modellentwicklung und des Trainings dienten als Grundlage zunächst die Standard RGB-Bilder der Kamera sowie ein Laserscanner. Der anfangs benötigte Laserscanner kann genaue Daten zur Tiefenwahrnehmung ausgeben. Diese Daten wurden als Hilfsmittel genutzt, um die Plausibilität der Modellergebnisse zu prüfen und automatisch weiter zu verbessern. Auf diesem Wege entstand schlussendlich ein Modell, welches eine äußerst geringe Fehleranfälligkeit aufweist, sodass nach der Trainingsphase auf den Abgleich mit dem Laserscanner verzichtet werden konnte. Das Lern- bzw. Trainingsverfahren erfolgte in zwei Stufen. Zunächst wurden vom System Einzelbilder analysiert. Das heißt, dass das entwickelte Modell lediglich ein Einzelbild auswertete und Tiefendaten generierte. Im zweiten Schritt wurden dann auch Bildsequenzen analysiert, um die Genauigkeit des Modells weiter zu verbessern.
Ein Hauptziel des Projektes war die Verringerung des mobilen Energiebedarfs von Service-Robotern. Hierdurch konnte der Aktionsradius und damit auch die Energieeffizienz erhöht bzw. die notwendige Akkuleistung verringert werden. Zugleich werden neben kleineren Akkus auch insgesamt weniger Hardwarekomponenten benötigt. Im Vergleich zu anderen Systemen werden hierdurch Energie- und Ressourceneinsparungen erzielt. Der Einsatz von Robotern erfolgt in der Regel zur Effizienzsteigerung. Je nachdem für welche Tätigkeit und an welchem Ort der Roboter eingesetzt wird, ergeben sich hierdurch weitere Energie- und Ressourceneinsparungen. Teilweise wird der Einsatz von Service-Robotern z.B. Dienstreisen überflüssig machen können, da durch sie eine hinreichende aktive Interaktion mit der Umwelt möglich ist.
Ziel ist es, die Steuerungslösung für den Einsatz bei neuen Systemen anzubieten. Zugleich wird auch eine Nachrüstbarkeit der Lösung bei bereits existierenden Systemen angestrebt.