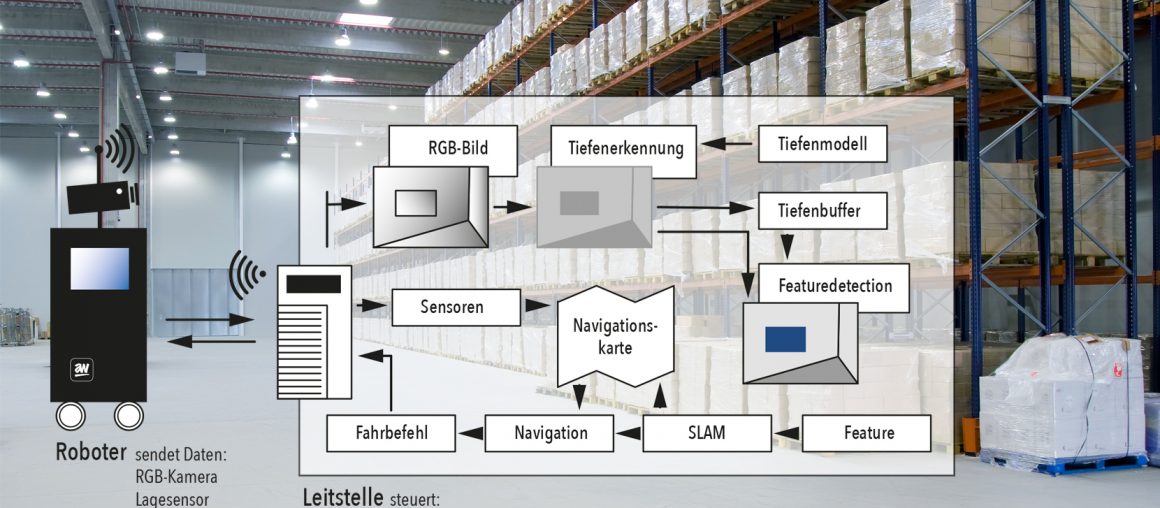
Mobile Roboter werten meist 3D-Laserscan- oder Kinect-Daten aus, um im Raum autonom navigieren zu können. Die mit dieser Technologie verbundenen Verfahren scheitern an mindestens einer der Herausforderungen: Navigation, Energieversorgung, Kosten.…
Mobile Roboter werten meist 3D-Laserscan- oder Kinect-Daten aus, um im Raum autonom navigieren zu können. Die mit dieser Technologie verbundenen Verfahren scheitern an mindestens einer der Herausforderungen: Navigation, Energieversorgung, Kosten.…